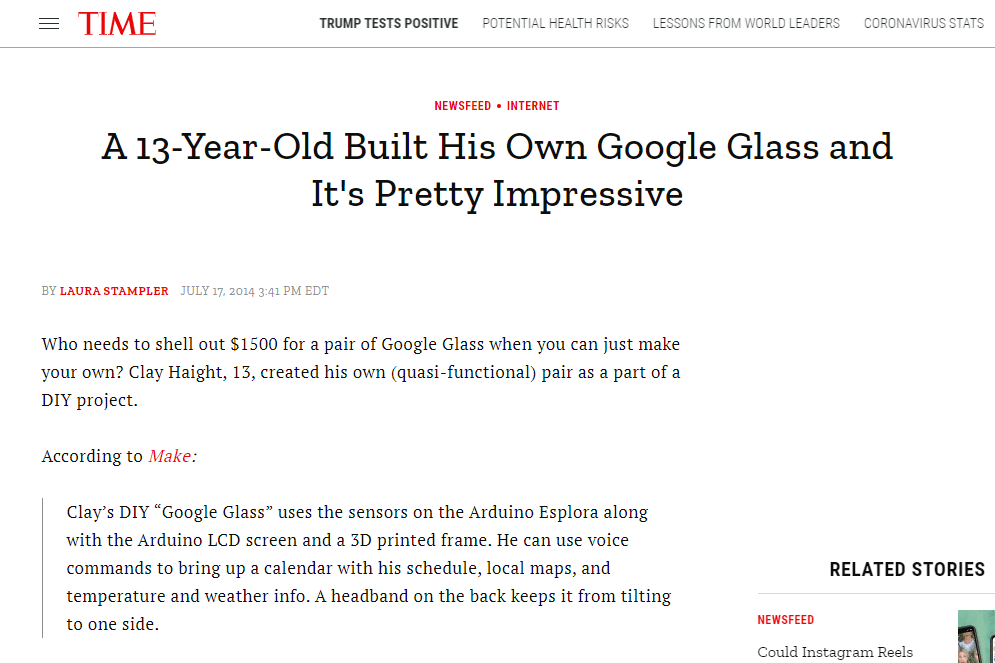
When I was in elementary school, I was teaching myself basic electronics principles, components and circuits. Going into middle school I started trying to apply this knowledge, trying to make a go-cart, small "robots" and other similar things. When I got into microcontrollers in grade 6, my passion for tinkering really took off, because now I could program my projects and add so much more value to them. In grade 7 after some Arduino experience, I built my first decent project, a pair of smart glasses with a TFT screen and voice control (pictured below).

Now I never said I was good at making things look professional, but it still impressed people, making it to reporters at Makezine, Time, and the Discovery channel. With this media attention, it caught the eyes of the Glass division at Google, who sent me a gift package in the mail which made 13 year old me really happy.


The next year I wanted to try making one of my dream projects come to life, I wanted to make a full-body exoskeleton capable of giving me extra strength and speed. Maybe that was too much of an ambitious goal for a 15-year-old... Despite the massive challenge this would pose, I went to work designing, 3D printing and prototyping parts for it. Realizing that this would end up costing a lot of money, I launched the project on Kickstarter, offering some rewards for people that helped out. The project was funded successfully, allowing me to buy some of the expensive equipment and components necessary.


I learned so much doing this project and some really valuable lessons that helped me become the person I am today. I realize, looking back, that it was extremely sketchy, and so many things were done wrong. But I am glad it went that way because I learned so much.
One of the most interesting things I developed for the project was a super light, powerful and compliant actuator. This "air muscle" was constructed with a soft, flexible tube that when pressurized would expand, pulling a braided sleeve and contracting (pictured below). Another thing I tried to do was to make the exoskeleton take all the weight off of the legs, which didn't end up working well, but the principles were there. This was done with over-center locking mechanisms, extending from the "spine" to the knees, allowing a load on the back to be transferred directly to the feet (pictured below).

