2019 FRC Robot
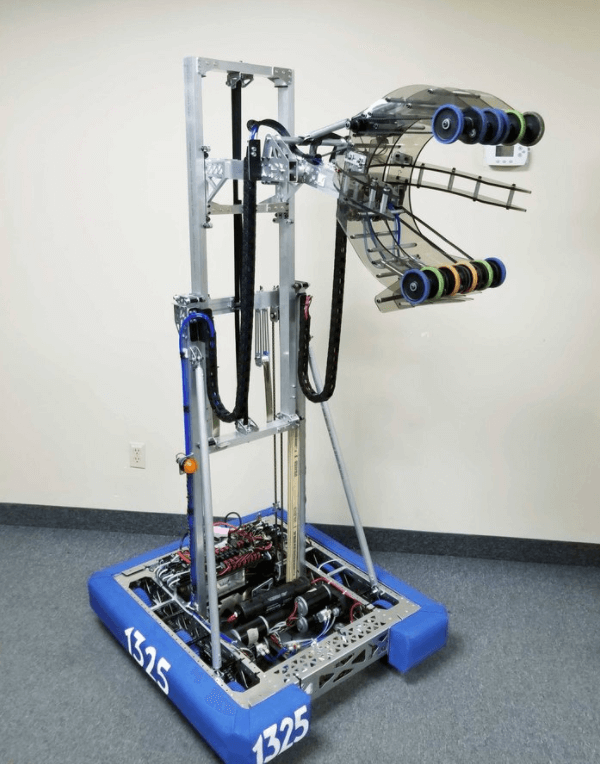
A World Championship semifinalist robot designed to manipulate balls and panels
In my last season on Team 1325, I was acting as co-captain of the team. I mainly focused on organizing the design side of things, making sure our final design followed our prototypes closely and ensuring different parts of the design would integrate well together. The 2019 FRC challenge was based on securing “rockets” with cargo and panels to seal the cargo in. It involved manipulating and scoring rubber balls, and attaching thin plastic discs to velcro on the rocket. Our robot was very competitive, specializing in extremely fast cycle times and eventually making it to semifinals at the World Championships in Detroit.

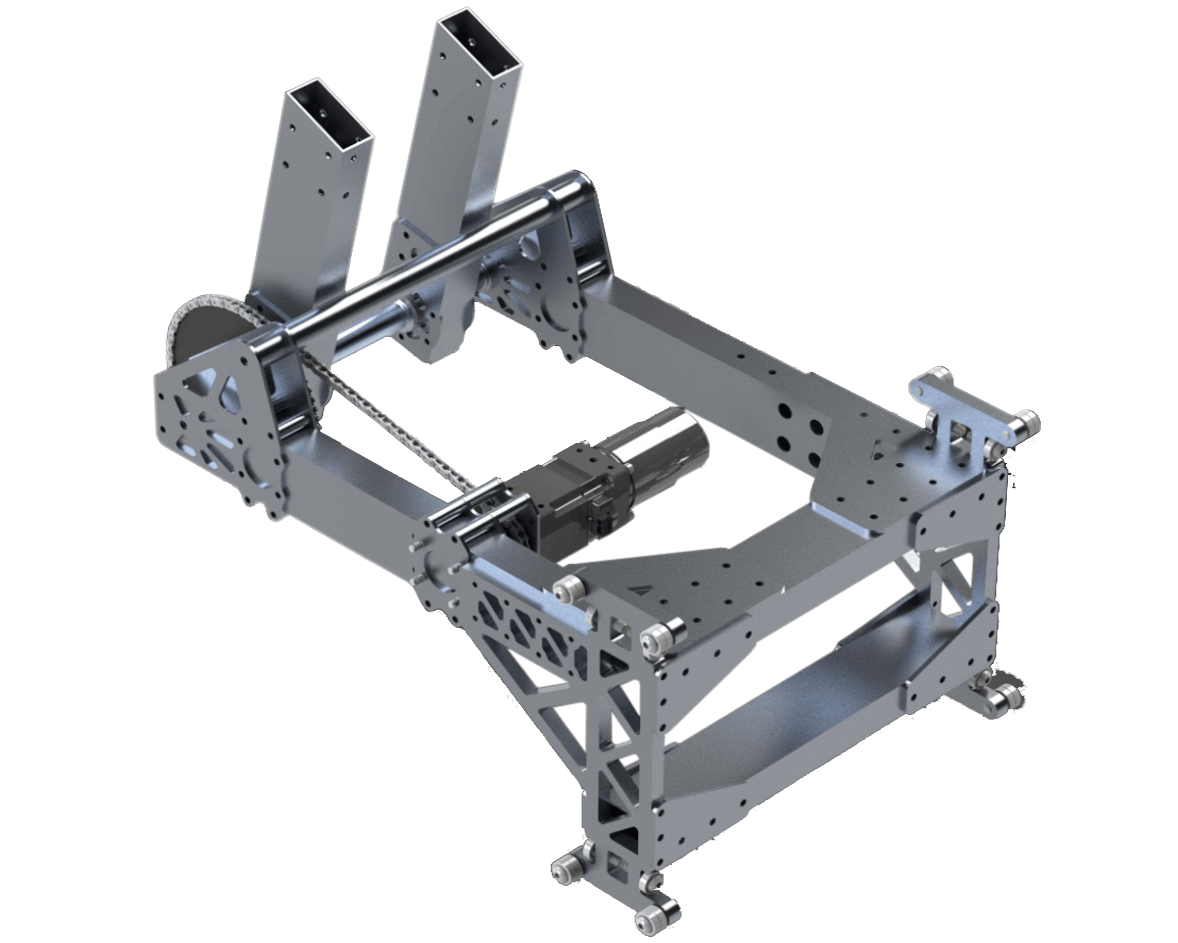
I focused on designing the rotating axis for the “claw” which weighed around 20lbs. Swinging a 20lb claw around an elevator is a difficult challenge, so FEA was utilized to ensure the design would be rigid enough. Below is the final design I came up with, using a 410:1 reduction, Oilite bushings, and a lot of structural reinforcement. The arm also had CNC cut plates to hold ball bearings, that would allow it to slide up and down on the elevator.
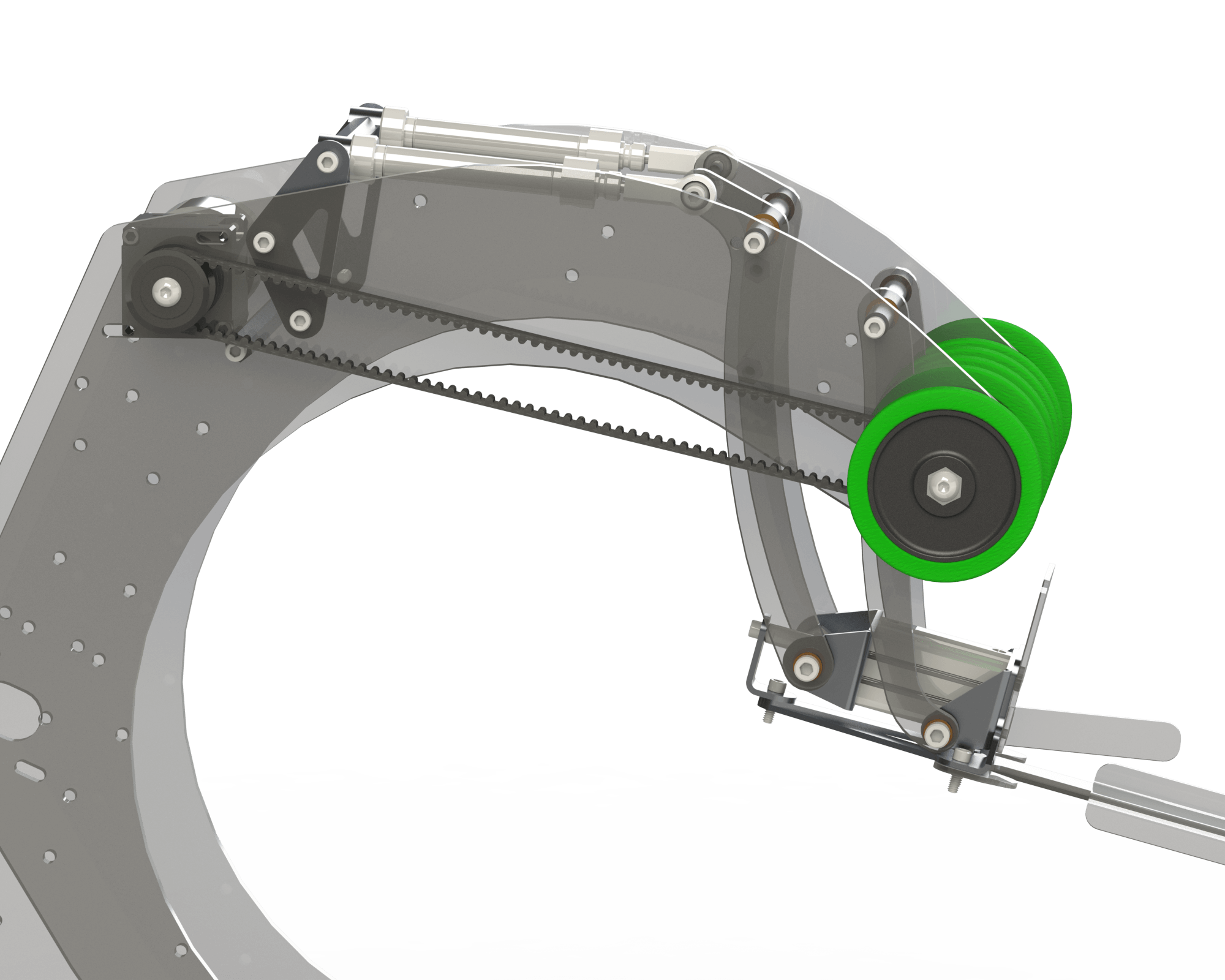
Another interesting thing that the team wanted to explore midseason was an addition to the claw that could swing down and hold the discs. With the claw being already so heavy and with little space to add a mechanism, a lot of clever packaging and design had to be utilized. I led this project and came up with a 4 bar mechanism that could fold up compactly, actuate and stop the movement of the “grabber” (pictured below).